Kiểm soát hành trình chủ động (ACC) là một tính năng được tích hợp vào các xe ô tô hiện đại nhằm giúp tài xế điều khiển tốc độ và khoảng cách an toàn với các phương tiện khác trên đường. Đây là một trong những công nghệ tiên tiến nhất trong lĩnh vực ô tô và đã được áp dụng rộng rãi trên các dòng xe cao cấp. Tuy nhiên, không phải ai cũng hiểu rõ về cấu tạo và nguyên lý hoạt động của hệ thống này cũng như cách sử dụng nó một cách hiệu quả. Vì vậy, trong bài viết này, chúng ta sẽ cùng tìm hiểu về kiểm soát hành trình chủ động, từ đó có thêm thông tin để lựa chọn cho mình một chiếc xe ô tô được trang bị tính năng này.
Kiểm soát hành trình chủ động (ACC) là gì?
Khái niệm về kiểm soát hành trình chủ động
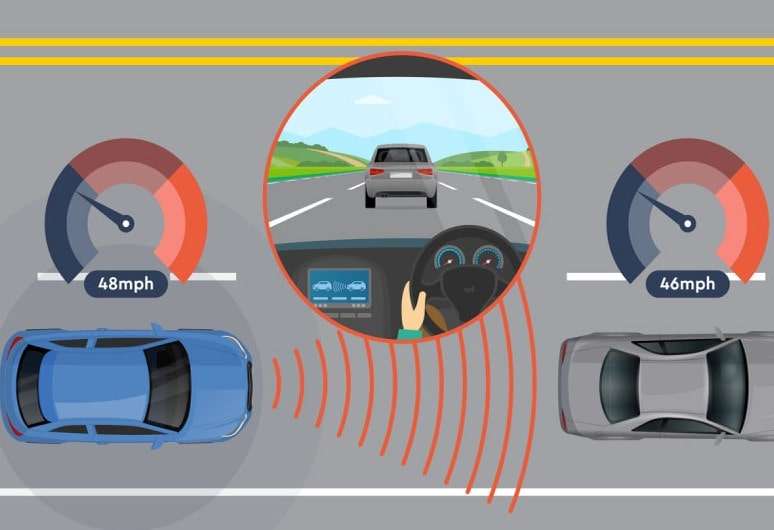
Kiểm soát hành trình chủ động (ACC) tên tiếng anh Active Cruise Control là một hệ thống hỗ trợ người lái tinh vi ngày càng trở nên phổ biến trên những chiếc ô tô hiện đại. Một tính năng được tích hợp vào hệ thống lái tự động của xe ô tô, giúp điều khiển tốc độ và khoảng cách an toàn với các phương tiện khác trên đường. Tính năng này sử dụng các cảm biến và radar để quét và theo dõi các phương tiện xung quanh, từ đó điều chỉnh tốc độ và khoảng cách giữa xe của bạn và các phương tiện khác. Nó cũng có thể tự động phanh hoặc tăng tốc độ để duy trì khoảng cách an toàn và giúp tài xế giảm bớt áp lực khi lái xe trên đường dài.
Lịch sử phát triển của kiểm soát hành trình chủ động
Tính năng kiểm soát hành trình chủ động đã được phát triển từ những năm 1990 và được sử dụng rộng rãi trên các dòng xe cao cấp từ những năm 2000. Ban đầu, tính năng này chỉ được tích hợp vào các dòng xe sang trọng như Mercedes-Benz, BMW hay Audi. Tuy nhiên, với sự phát triển của công nghệ, hiện nay nó đã được áp dụng trên nhiều dòng xe khác nhau, từ xe hơi gia đình cho đến các dòng xe giá rẻ.
Cách hoạt động của kiểm soát hành trình chủ động
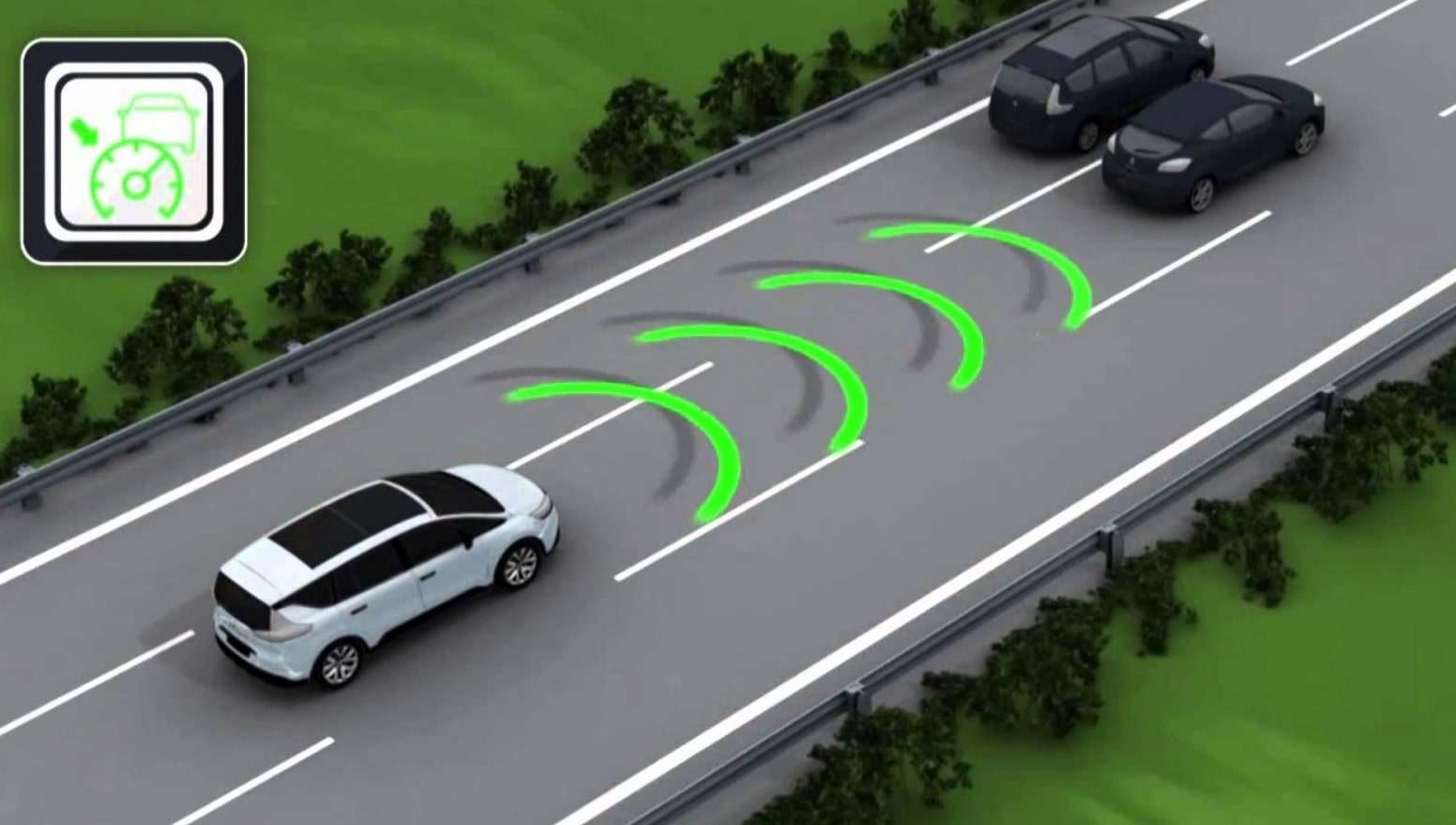
Kiểm soát hành trình chủ động hoạt động bằng cách sử dụng các cảm biến và radar để quét và theo dõi các phương tiện xung quanh. Khi tài xế thiết lập tốc độ mong muốn, hệ thống sẽ tự động duy trì khoảng cách an toàn với các phương tiện khác trên đường. Nếu có phương tiện di chuyển chậm hơn hoặc dừng lại trước mũi xe của bạn, hệ thống sẽ tự động phanh để giữ khoảng cách an toàn. Ngược lại, nếu có phương tiện vượt lên từ phía sau, hệ thống sẽ tăng tốc độ để duy trì khoảng cách an toàn.
Cấu tạo và nguyên lý hoạt động của hệ thống điều khiển hành trình chủ động
Cấu tạo của hệ thống kiểm soát hành trình chủ động
Hệ thống kiểm soát hành trình chủ động gồm các thành phần chính sau:
- Radar: Là một cảm biến được đặt ở phía trước của xe, giúp quét và theo dõi các phương tiện xung quanh. Nó có khả năng phát hiện các phương tiện trong khoảng cách từ 10 đến 200 mét và gửi tín hiệu về cho bộ điều khiển.
- Bộ điều khiển: Là bộ não của hệ thống, nhận tín hiệu từ radar và các cảm biến khác để tính toán và điều khiển tốc độ và khoảng cách an toàn với các phương tiện khác.
- Cảm biến áp suất lốp: Được tích hợp vào hệ thống để cung cấp thông tin về áp suất lốp cho bộ điều khiển. Điều này giúp tăng tính chính xác của hệ thống và đảm bảo an toàn khi lái xe.
- Cảm biến góc lái: Giúp hệ thống nhận biết tình trạng lái xe và điều chỉnh tốc độ và khoảng cách an toàn phù hợp.
Nguyên lý hoạt động của hệ thống kiểm soát hành trình chủ động
Hệ thống kiểm soát hành trình chủ động hoạt động dựa trên nguyên lý làm việc của hệ thống lái tự động. Nó sử dụng các cảm biến và radar để quét và theo dõi các phương tiện xung quanh, từ đó tính toán và điều chỉnh tốc độ và khoảng cách an toàn với các phương tiện khác trên đường. Điều này giúp giảm bớt áp lực cho tài xế khi lái xe trên đường dài và đảm bảo an toàn cho hành khách.
Một số lưu ý khi sử dụng chức năng kiểm soát hành trình chủ động
Lựa chọn tốc độ và khoảng cách an toàn
Khi sử dụng tính năng kiểm soát hành trình chủ động, tài xế cần lựa chọn tốc độ và khoảng cách an toàn phù hợp với tình huống giao thông hiện tại. Tốc độ được thiết lập quá cao hoặc khoảng cách an toàn quá ngắn có thể gây nguy hiểm cho tài xế và các phương tiện xung quanh.
Không dùng trong điều kiện thời tiết xấu
Hệ thống kiểm soát hành trình chủ động không hoạt động hiệu quả trong điều kiện thời tiết xấu như mưa, tuyết hay sương mù. Trong những trường hợp này, tài xế cần phải tự điều khiển tốc độ và khoảng cách an toàn với các phương tiện khác.
Không dùng trong khu vực có nhiều xe máy
Hệ thống kiểm soát hành trình chủ động không hoạt động hiệu quả trong khu vực có nhiều xe máy. Vì các xe máy thường di chuyển nhanh và không có radar để gửi tín hiệu về cho hệ thống, điều này có thể gây ra những tình huống nguy hiểm cho tài xế và các phương tiện khác.
Có nên mua một chiếc xe ô tô được trang bị hệ thống ACC?
Ưu điểm của hệ thống kiểm soát hành trình chủ động
- Giúp giảm bớt áp lực cho tài xế khi lái xe trên đường dài.
- Tăng tính an toàn cho hành khách và các phương tiện xung quanh.
- Tiết kiệm nhiên liệu bằng cách duy trì tốc độ và khoảng cách an toàn với các phương tiện khác.
- Hỗ trợ tài xế trong việc duy trì tốc độ và khoảng cách an toàn trong các tình huống giao thông phức tạp.
Nhược điểm của hệ thống kiểm soát hành trình chủ động
- Giá thành cao: Tính năng này thường chỉ được tích hợp vào các dòng xe cao cấp, vì vậy giá thành của xe sẽ tăng lên.
- Không hoạt động hiệu quả trong một số tình huống nhất định như thời tiết xấu hay khu vực có nhiều xe máy.
- Cần phải thường xuyên bảo trì và cập nhật để đảm bảo tính hiệu quả của hệ thống.
Với những ưu điểm và nhược điểm trên, việc lựa chọn một chiếc xe ô tô được trang bị hệ thống kiểm soát hành trình chủ động phụ thuộc vào nhu cầu và khả năng tài chính của mỗi người. Nếu bạn thường xuyên lái xe trên đường dài và muốn giảm bớt áp lực khi lái xe, thì tính năng này sẽ là một lựa chọn hữu ích. Tuy nhiên, nếu bạn chỉ sử dụng xe trong thành phố và không gặp nhiều tình huống giao thông phức tạp, thì có thể không cần thiết phải đầu tư vào tính năng này.
Kết luận
Kiểm soát hành trình chủ động là một tính năng tiên tiến và hữu ích trong lĩnh vực ô tô, giúp tài xế giảm bớt áp lực khi lái xe trên đường dài và tăng tính an toàn cho hành khách và các phương tiện xung quanh. Tuy nhiên, việc sử dụng tính năng này cần được thực hiện đúng cách và có những lưu ý riêng để đảm bảo tính hiệu quả và an toàn. Vì vậy, khi lựa chọn một chiếc xe ô tô được trang bị hệ thống kiểm soát hành trình chủ động, bạn cần cân nhắc kỹ và tìm hiểu thông tin để có thể sử dụng tính năng này một cách hiệu quả nhất.


